
Agustin Schiffrin, FLEET Chief Investigator, Monash

Julian Ceddia, FLEET PhD candidate, Monash
The Challenge
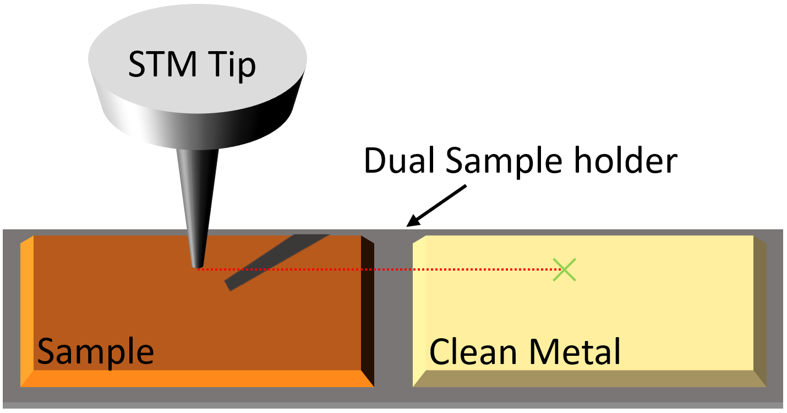
Figure 1: Schematic of the STM probe above the dual sample holder setup. The clean reference metal is ideal for tip shaping. Scanbot can track and manoeuvre the STM tip between the two when required.
Scanning Tunnelling Microscopes (STMs) are capable of acquiring images of surfaces with atomic-scale resolution. They accomplish this by scanning an atomically sharp probe across the surface of a sample while monitoring an electric current. Conditioning (e.g. sharpening) of the probe, along with finding regions of interest on a sample are two time-consuming tasks that are currently performed by trained human operators. Automating these tasks would greatly improve the output and efficiency of STMs.
The Solution
Scanbot: A Python-based robot that is compatible with a broad range of STMs, which can autonomously condition STM probes and survey sample surfaces (figure 2).
Key Benefits
-
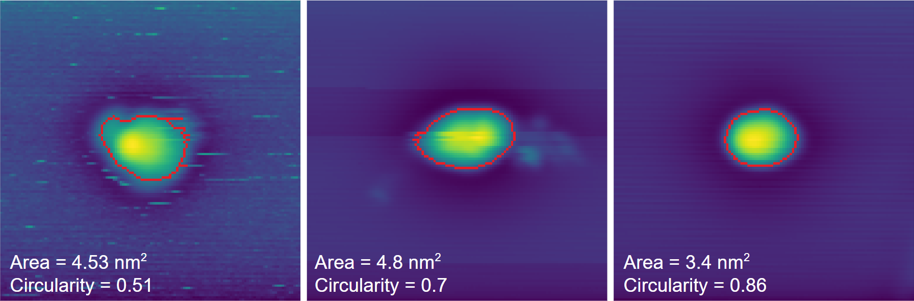
Figure 2: Successive STM images of the tip’s imprint on a clean metal after a tip-shaping action. The geometry of the imprint reflects the geometry of the scanning probe apex.
Novel approach to autonomous probe conditioning in STM experiments (figure 3)
- Automate the ‘boring’ parts of STM operation
Development Stage
- Proof of concept completed through the FLEET Translation Program.
- Testing ideas
Brief Description & Differentiation
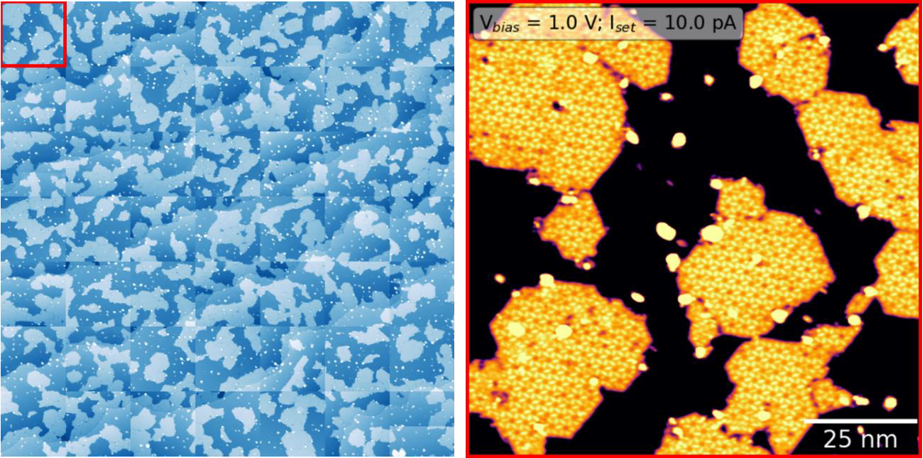
Fig 3: Scanbot’s automated STM survey carried out on a sample after completing the iterative tip-shaping process.
To reduce the time-intensive nature of STM experiments, various innovative solutions have been implemented to automate specific tasks (Wang et al., 2021), (Krull et al., 2020), (Gordon et al., 2020), (Rashidi & Wolkow, 2018). Although these approaches have significantly advanced automation in STM experiments, they are often tailored to specific surfaces and STM equipment, making it challenging to transfer them directly to other labs studying different kinds of samples or working with different STM systems.
To overcome these limitations, we have developed Scanbot, a Python based robot that is compatible with a broader range of STMs. Our package incorporates Scanbot’s distinctive approach to tip shaping, which involves tracking and manoeuvring the tip above a dual sample holder (figure 1). This method is particularly beneficial in experiments where the sample’s properties make it challenging or impossible to condition the probe without a clean reference metal.
Intellectual Property
- N/A
Key Publications
- Scanbot is under review in the Journal of Open Source Software
More information
- Contact Julian Ceddia, Monash University julian.ceddia@monash.edu
- Contact A/Prof Agustin Schiffrin, Monash University agustin.schiffrin@monash.edu
- Read more about ScanBot new-horizons-spm.github.io/scanbot
